更新が遅くなってすみません。タミヤTSU-01サーボモーターを追加しました。トルクはかなり低いですが、これで足を作るためのモーターは数が揃いました。今度はPWMの数が足りないのが問題です。
コントローラ2号機完成
コントローラの2つめが完成しました。今回は使えないボタンはありません。アナログとデジタルの切り替えランプの信号も出力できるし、アナログの信号も出力できてAD変換で拾えます。プレステのコントローラを余すところなく利用しました。やはり、プレステのコントローラは使えますね。SONYさんありがとう!
右腕っぽいロボットアーム
とりあえず、ありあわせのアルミ板0.5~1mmを使ってサーボモーターを繋ぎ右腕っぽいものをつくってみた。H8/3052マイコンが5つしかタイマを積んでないということで、現時点で5つまでしかサーボを同時に制御できません。分配器をつくるか…SHの上位マイコンを使うか…。他のマシンを見てても3052のスペックで動いてるマシンはなかなかないし。考えどころですね。挑戦するのもいいかなぁ。
ロボットアーム!!
ロボットアームを作成しています。コントローラは、壊れたHORIのプレステ用コントローラを再利用しました。接続にIDEケーブルがいい感じに使えました。(14PINに対して50PINは多すぎますがwPWMも結構自由に使えるようになりました。9月には人型になって動けるようがんばろう!!
新年度会!
システムで新年度会をしました。
大量の「お・さ・け」です!ww
BBQお疲れさまでした~。

小型化!ライントレース部自作成功!
一番初めに自作しようとして失敗したライントレース部。
30個買い置きしてたフォトインタラプタを使って自作。
また、マイコンのマザーボードとマシンを切り離す事で小型化。
プログラム班はモーション作り、加工班は電池ボックス作り……と、分担が進んできました。
同時にサーボモーターのロボットアームのプロジェクトが立ち上がりました。
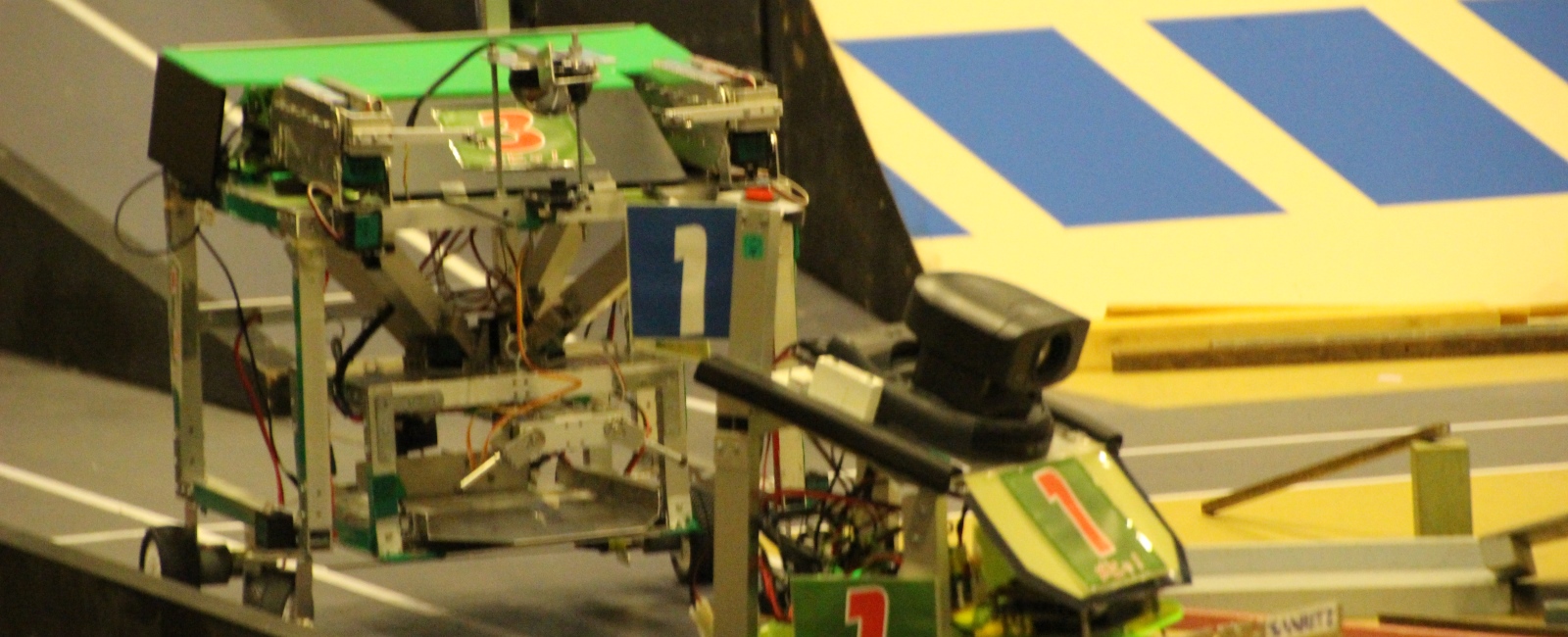
ROBO-ONE

東京にROBO-ONEを見に行きました。
先生が出ることもあり、控え室内部の様子もいろいろ見学させてもらえ、いろいろロボットを間近で見れました。
そして・・・「次の大会には絶対出よう!」
そう決心しました。
三号機「姫」(MCK-0002)ライントレース・800mmセンサテスト
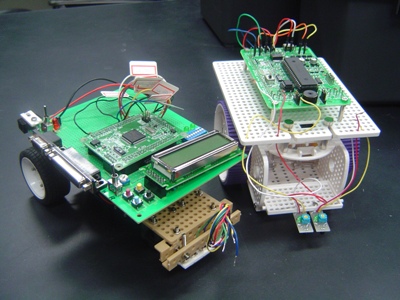
三号機(右)「姫」を使ったライントレースと800mmセンサの搭載実験成功。
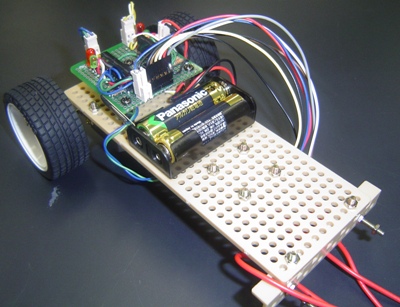
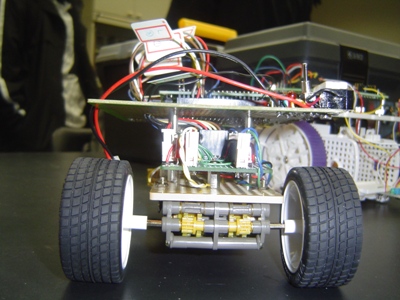
壱号機完成。
サークル設立のときから作っているマシンがいちおう形となりました。
もともとPICで作る予定で購入したパーツですが、マイコンで組んだらたくさん余りました。
でも、本の通り作ったのではなく、回路や構成を考えて作ったぶん愛着も沸いたし勉強になりました。
マイコンかませても制御なしだとやっぱり旋回してます(笑)
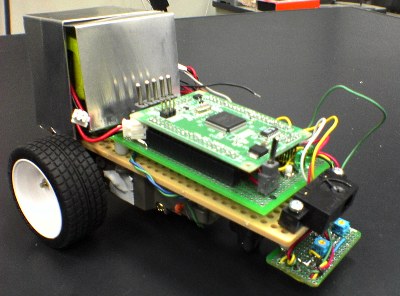
モータードライブ作成。
一番初めから作っているマシンのモータードライブが完成しました。
マイコンにさえつなげれば、自由自在に走ります。
当初はライントレース専用マシンだったのですが、自作のトレース部が大破したので、既製品のセンサを大量にとりつけることに決定しました。
ちなみに制御なしで走行したら左右のモーターの動作に激しい誤差がありました。