ひさびさにサーボ音聞きました。予定を少し前倒しにして足の配線を完了しました。今回の機体の剛性は予想を遙かに超えています。初期値を取って機体を立ててみましたが、すばらしい安定性。少々押したぐらいでは倒れそうにありません。とりあえず、未改造のKHR-1のボディアタックくらいなら耐えられそう。問題はやはり・・・「起き上がり」
月別: 2006年2月
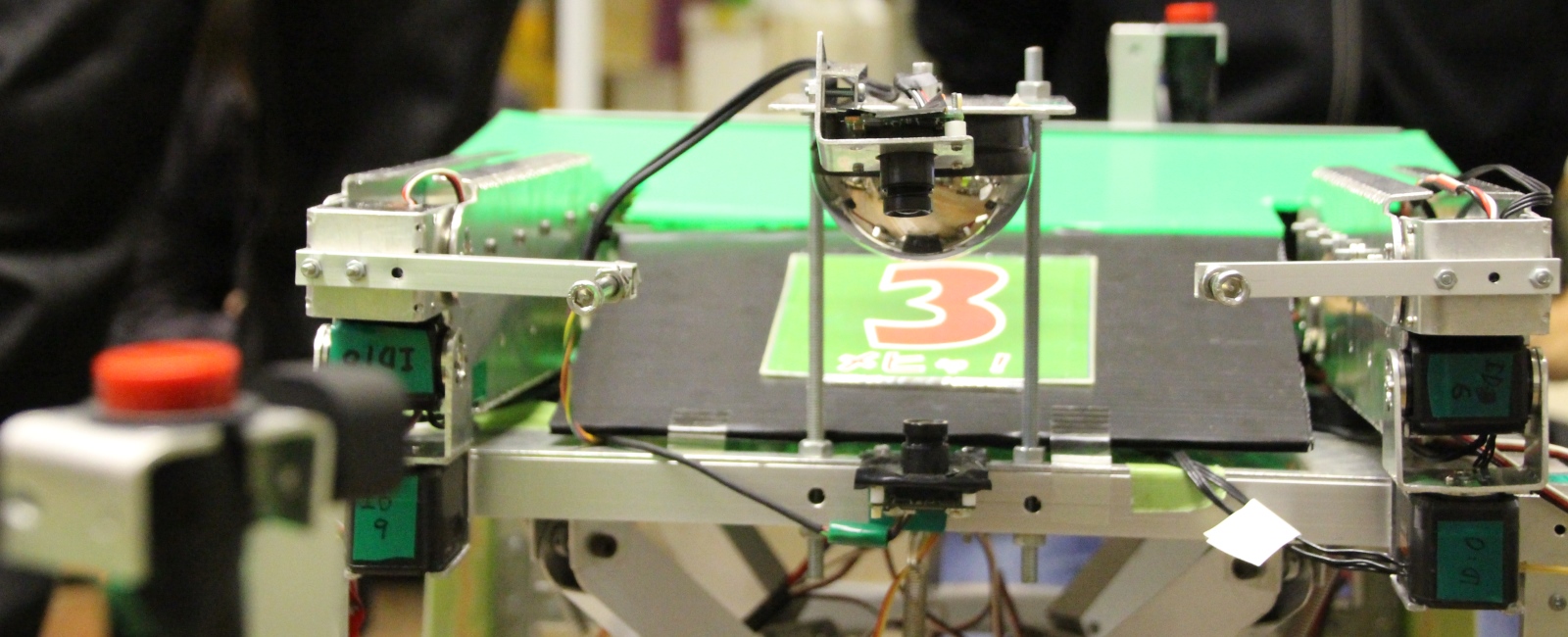
パーツが完成しました。
大体こんな感じです。今回はすごく太っちょマシンです。でも、重量は電池含めて1600gとかなり軽くなる予定です。腕のサーボ外すこともできるんで・・・今更J-CLASSも登録しとけば良かったとか思ってももう遅い;;ちなみに時間の都合上、腕はFREEDOMの流用。何人が気づくだろう。
穴あけ!曲げ!研磨!
鬼は~そと♪ 福は~うち♪2年で豆食いました。年の数。さて、それはさておき、今日は「穴あけ」「曲げ」「研磨」でした。「研磨」は初の工程ですね。ヤスリ→耐水ペーパーのあと、ピカールを使って磨きました。かなりの仕上がりになっております。そして、アルミが輝くにつれて、手は真っ黒にww