レスコンに向けての勉強会を行いました。
内容は主にレスコンボードの使用説明とレスコンに出場するロボットの制御方針についてです。
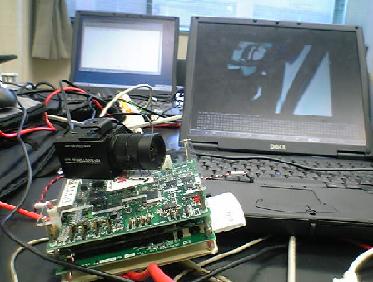
レスコンについてですがメヒャはレスコンボードを通信と画像処理のみに使い、サーボの制御は別にマイコンを製作することになりました。
画像はPC間の通信です。
とりあえず今後の作業はロボット製作とサーボ制御用のマイコン製作です。
一番の課題がロボットの方ですね。
今まで作ってきたサイズの倍のロボを3台製作するわけですから作業量がどえらいことにまります。そういう意味では部員勧誘が急務か・・・
正直えらいもんに手ぇだしたなぁって感じです。
